About Me
Dawood Wasif
PhD Researcher at Virginia Tech
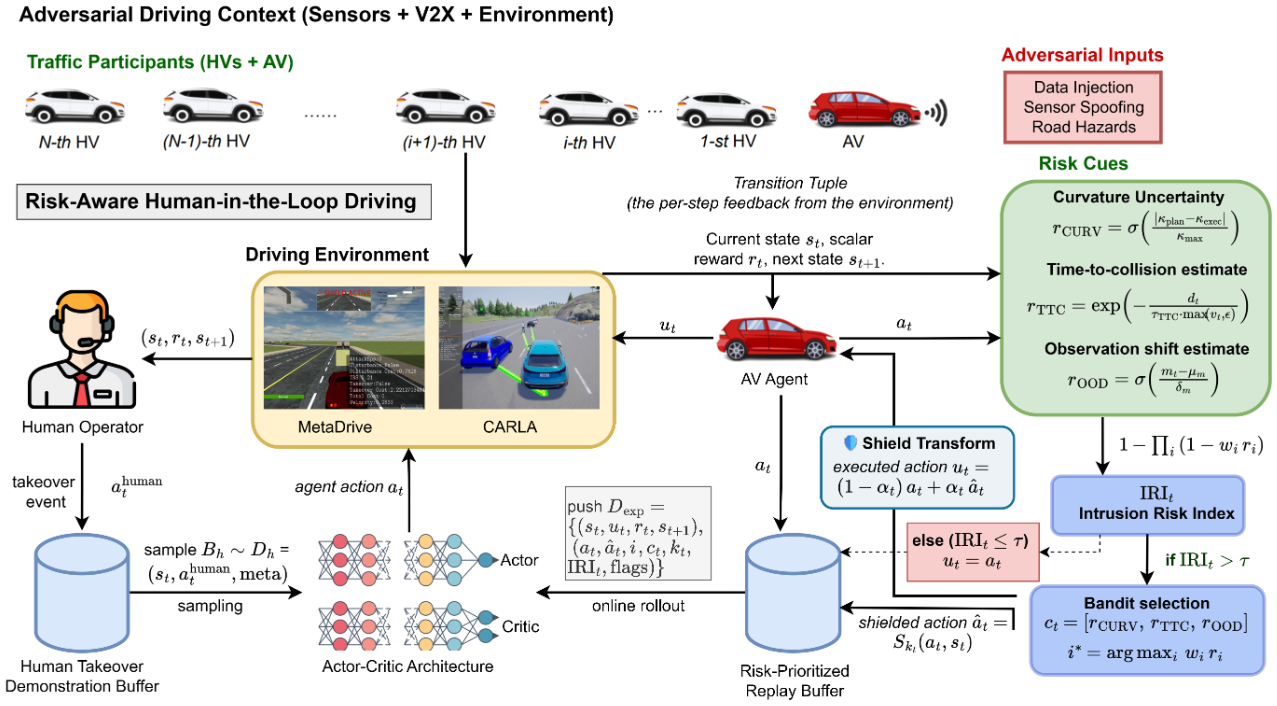
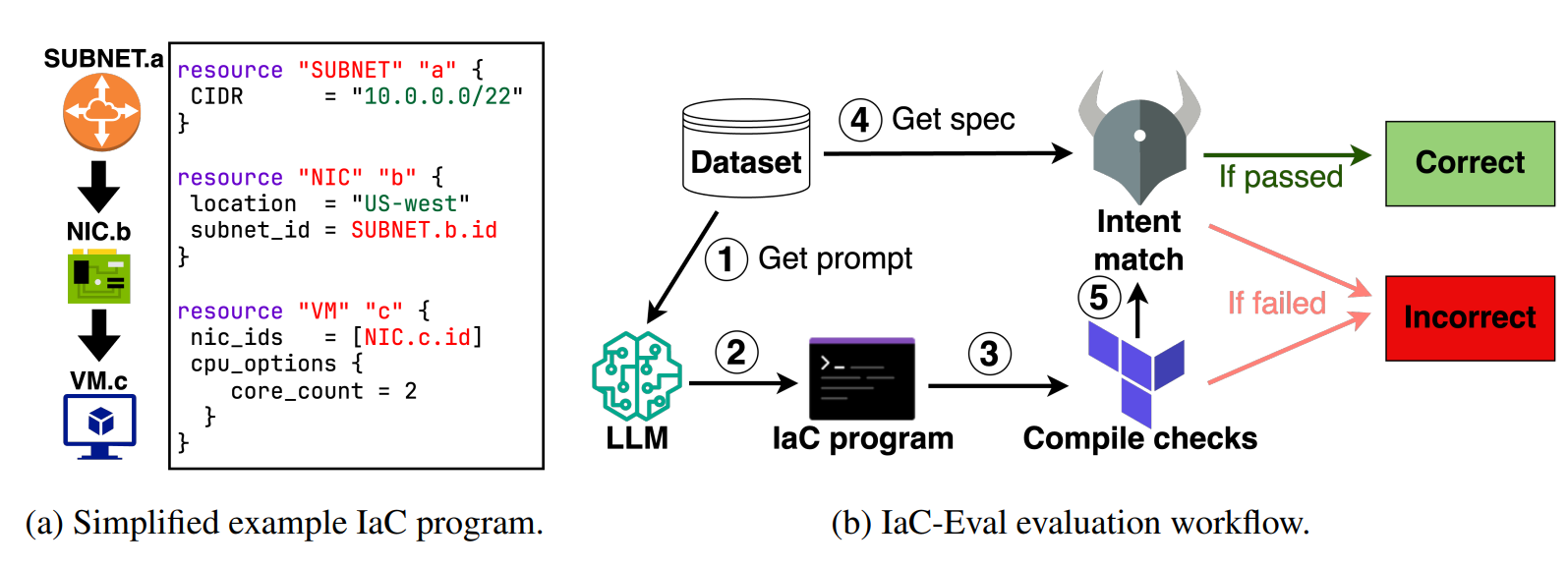
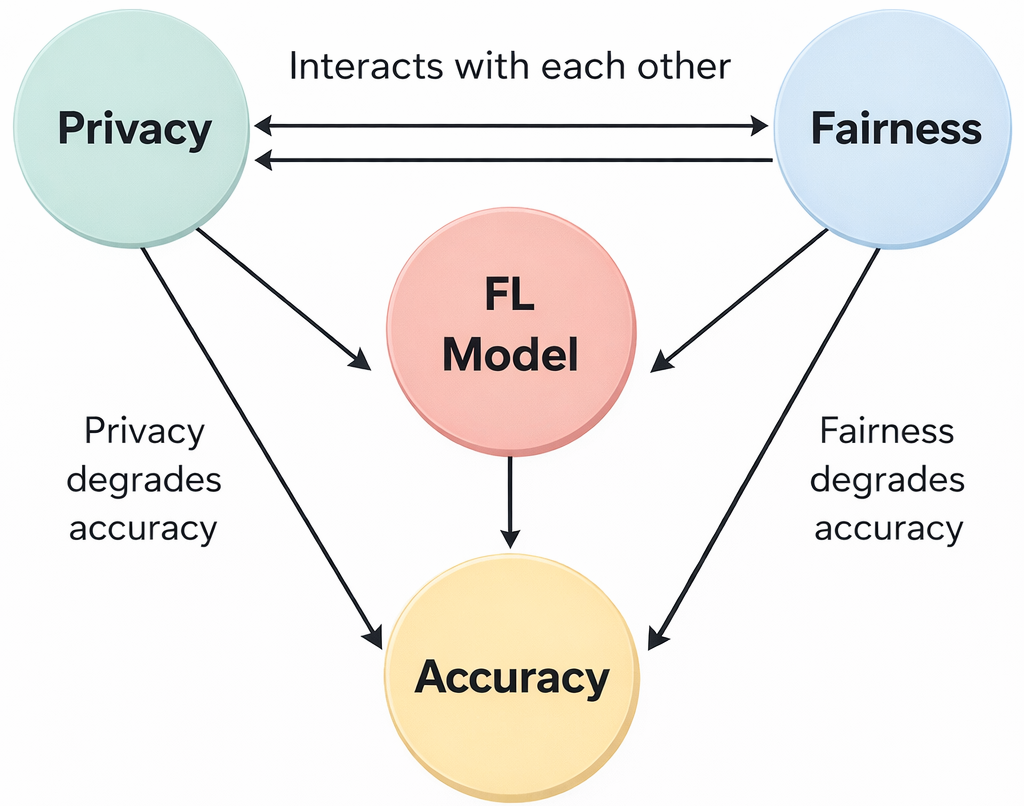
I am a third-year Computer Science PhD student at Virginia Tech, working in the Trustworthy Cyberspace Lab. My research addresses a core challenge in modern machine learning: how to build systems that are simultaneously private, fair, and high-performing when deployed in safety-critical environments. I develop principled methods at the intersection of federated learning, human-in-the-loop reinforcement learning, and multi-agent LLM systems. On the applied side, I design and evaluate these frameworks in domains where failures carry real consequences: autonomous vehicles, UAV/UGV swarm coordination, and cloud infrastructure automation.
I have had the opportunity to learn from and work alongside outstanding researchers, such as Dr. Jin-Hee Cho, Dr. Chang-Tien Lu, Dr. Chandan K. Reddy, and Dr. Terrence J. Moore. My recent work has been accepted at top venues including ICML, ICLR, AAAI/ACM AIES, and FAccT. Beyond research, I completed my summer internship with iD Tech @ Amazon HQ2 (Arlington) in Summer 2025, and I joined Rivian in May 2026 as a Machine Learning Engineering Intern.
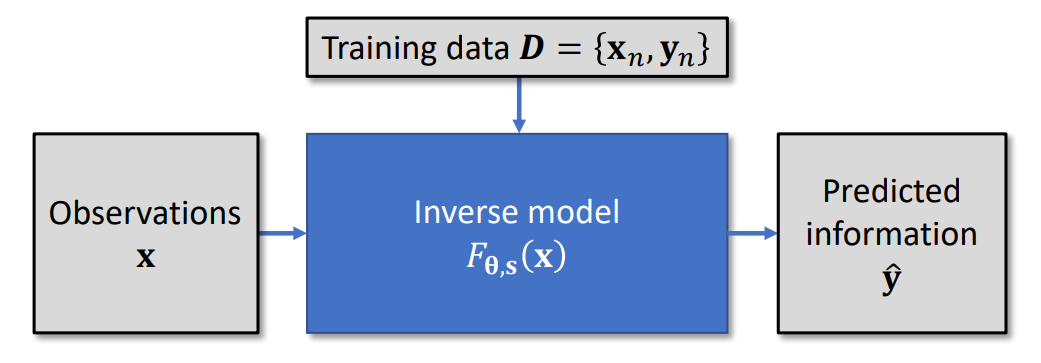
Prior to Virginia Tech, I held a DAAD Research Fellowship at the Technical University of Munich (TUM), where I worked on uncertainty quantification for remote sensing under Prof. Xiaoxiang Zhu. I received my BS in Computer Science from NUST, Pakistan.

Latest News
Recent papers, talks, publications, and research milestones